

成功案例
灵思创奇基于工业标准为用户开展多学科、多领域的半实物仿真测试工作提供平台支撑工具
您当前的位置:
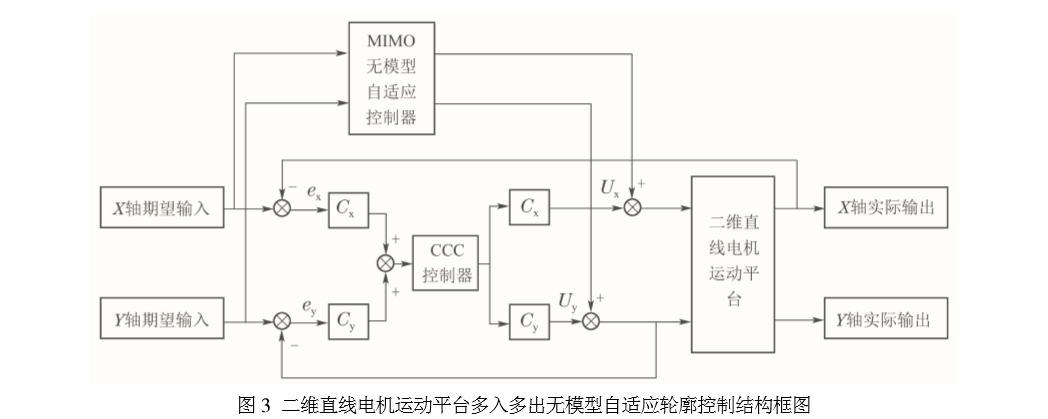
论文案例:二维直线电机的多入多出无模型自适应轮廓控制
2020-08-05 13:56:00
577
基本信息:
北京信息科技大学·自动化学院 控制工程专业、数据驱动及其控制方向
论文内容简介:
针对传统的单入单出控制器无法解决二维直线电机存在的非线性, 不确定性以及强耦合作用等问题, 依据无模型自适应控制不依赖于被控系统精确数学模型, 仅需受控系统输入输出数据便能实现自适应控制这一特点, 采用多入多出的紧格式动态线性化无模型自适应控制算法对二维直线电机XY 轴进行整体控制器设计. 同时, 针对二维直线电机这种含有纯二阶积分环节的非自平衡系统, 提出了多入多出无模型自适应控制改良方法, 并进行严格的稳定性和收敛性证明。
论文创新点:
为了提高二维直线电机的轮廓精度, 在多入多出无模型自适应控制改进方法的基础上, 加入交叉耦合控制器, 与传统的交叉耦合控制方法相比较, 提高了跟踪精度和轮廓精度. 并通过仿真和实物实验证明了所提方案的有效性。
论文工程应用价值:
通过仿真和实物实验验证,验证了本文所提控制方法提高了二维直线电机的跟踪精度和轮廓精度,具有一定的应用价值。
灵思创奇设备发挥的科研价值:
本文研究采用北京灵思创奇生产的半实物仿真平台与二维直线电机集成连接进行实物验证,通过实物验证,以证明本文所提改进的多入多出无模型自适应控制方案的有效性和实际应用价值。
相关推荐
成功案例
航天案例
航空案例
兵器案例
工程机械案例
工业自动化案例