

简介:
压电陶瓷神经网络控制仿真系统是我公司与北京理工大学深入合作搭建的半实物仿真验证平台,针对压电陶瓷执行机构进行神经网络控制,这是典型的面向控制系统的开发应用。此平台主要用于科研研究,使用实时仿真系统可利用早期设计的Matlab Simulink控制系统仿真模型,直接驱动压电陶瓷执行机构,快速验证算法的有效性。
挑战:
在超精密定位系统的研究中,要对位置进行实时、精确控制,这就对压电致动器的实时性要求非常高。压电致动器(PEA)的迟滞特性主要导致纳米定位系统的精度和性能的降低。
为了补偿迟滞,北理工科研团队提出一种逆模型作为分段相似性前馈补偿器,通过自适应方法改进逆模型,以消除相似度。由于理论设计缺乏数据验证,北理工科研团队需要通过大量半实物仿真和快速原型设计测试来改进和验证补偿器设计。
解决方案:
北京理工大学老师分别用提出的相似性补偿器和自适应相似性补偿器进行了实验。通过灵思创奇公司提供的半实物仿真器和实时仿真软件包搭建压电陶瓷神经网络控制仿真系统进行实验验证。
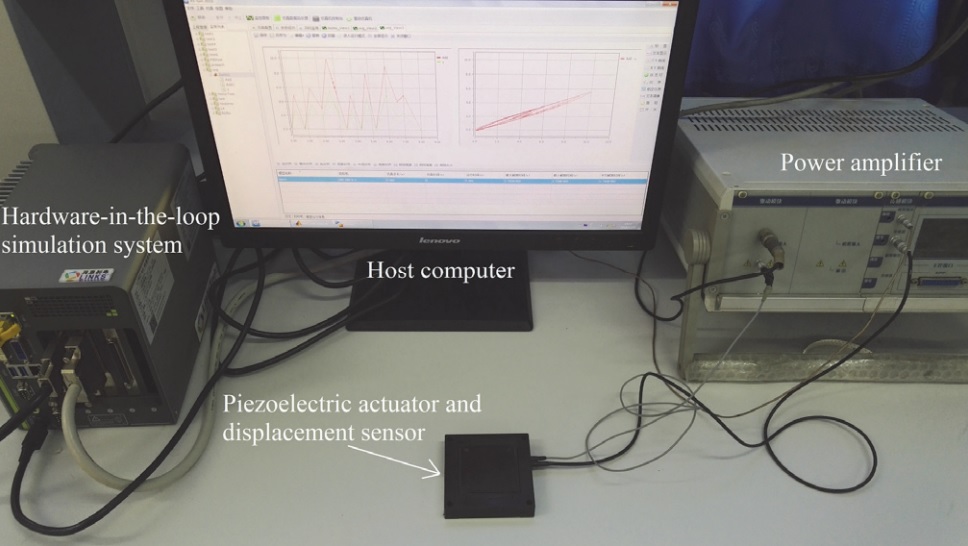
基于压电陶瓷的精密定位系统的架构图如上所示, 左侧是灵思创奇半实物仿真器作为控制器原型,中间是上位机和压电致动器和位移传感器,右侧是功率放大器。
在此压电陶瓷神经网络控制仿真系统中,半实物仿真器作为控制器,是典型的RCP(Rapid Control Prototyping)快速控制原型设计应用。实验设计是利用HPV 系列驱动压电致动器,压电致动器的输出位移数据通过应变片式电阻传感器测量(分辨率:0.01μm)。此电阻传感器安装在驱动装置内部,由主机电脑控制的LINKS-RT 硬件在环模块模拟系统,计算并输出控制信号。
实验结果表明,该补偿器能取得良好的效果,并具有较好的性能,尤其适用于高频激励;并且该自适应相似性补偿器具有结构简单、存储空间小、计算速度快等优点,适用于大多数工程场合。
总结:
北理工科研团队的设计结合我司开发的仿真管理软件RT-SIM进行了快速控制原型半实物仿真验证实验,验证了补偿器控制算法的正确性(纳米级),满足压电陶瓷仿真系统的控制要求。北京理工科研团队应用压电陶瓷神经网络控制仿真系统对压电神经网络进行了关键技术研究,在此平台上对控制器算法进行验证,提高了追踪精度和动态性能,为科研实验提供了有力的数据支撑,节省了宝贵的科研时间。
压电陶瓷神经网络控制仿真系统中可以验证各种基于matlab/simulinks设计模型,在压电陶瓷神经网络研究方面,北理工已发表了三篇论文:
l Adaptive Inverse Control of Piezoelectric Actuators based on Segment Similarity[1]《基于段相似性的压电陶瓷执行器自适应逆控制》
l A Hybrid Feedforward-feedback Hysteresis Compensator in Piezoelectric Actuators Based on Least Squares Support Vector Machine[2] 《一种针对压电陶瓷的最小二乘支持向量机的混合前馈反馈控制器》
l An adaptive weighted least square support vector regression for hysteresis in piezoelectric actuators[3]《一种自适应加权最小二乘支持向量机的压电陶瓷迟滞建模方法》