

成功案例
灵思创奇基于工业标准为用户开展多学科、多领域的半实物仿真测试工作提供平台支撑工具
您当前的位置:
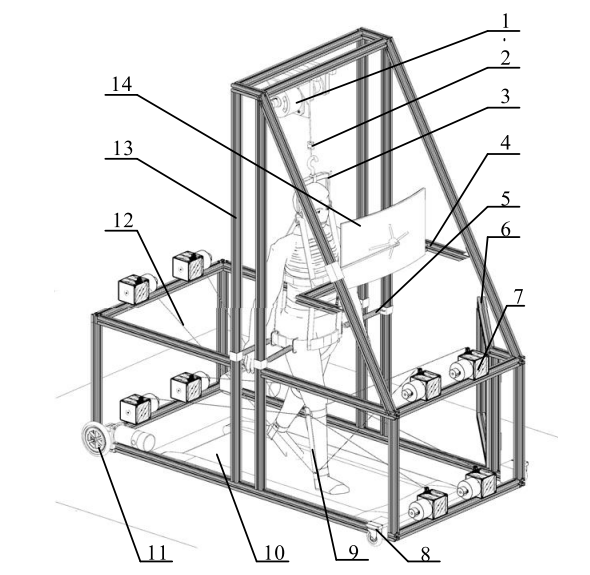
论文案例-可移动式柔索驱动下肢康复机器人设计及实验研究
2019-02-14 15:37:00
1188
摘要
为解决现有下肢康复机器人在配构型设计、人机兼容性、重力补偿以及多重康复模式等问题,本文提出并设计了一种可移动式柔索驱动式下肢康复机器人,可实现被动模式、主动模式和辅助模式下的步态训练及步行训练。首先,本文介绍了可移动式柔索驱动式下肢康复机器人的构造及工作原理,并进一步优化了机器人构型。其次,本文详细分析了被动式力伺服系统的关键性控制问题。为了改善该康复机器人在主动康复训练过程中的加载精度及速度,本文提出了柔索驱动单元动力学,并基于此动态模式提出了主动性力控对策。最后,本文通过实验研究探讨了该康复机器人的速度控制对策及主动性力控对策。根据实验结果,速度伺服系统跟踪能力良好,能够满足被动康复训练的需求。主动性力控对策大大改善了力伺服系统的加载精度及动态性能。在正常康复训练频率范围内,力伺服系统跟踪能力良好,可满足主动康复训练的需求。
实验研究
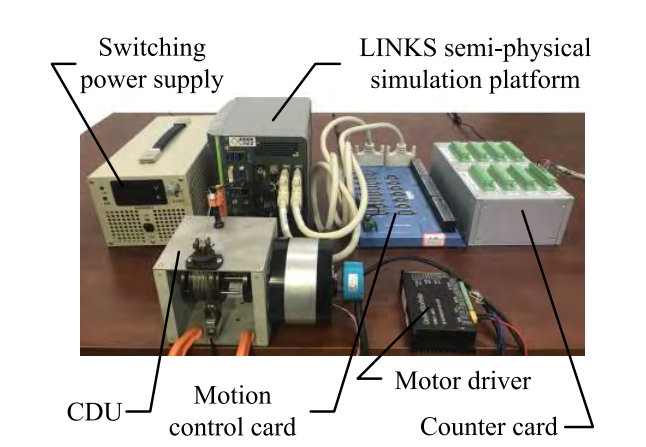
为了证明本文提出的控制对策有实际效用,作者进行了速度伺服实验以及主动性力伺服实验,并在本章节中重点阐述。柔索驱动实验平台请参考图16。本实验采用LINKS半物理模拟平台作为实验平台的核心部分,基于LINKS平台建造控制器,并完成了调试工作。
该系统的搭建不仅为中国石油大学科研团队节省了科研时间,而且积累了宝贵的科研经验。在这里特别感谢中国石油大学师生对我们公司产品的信任和支持!
相关推荐
成功案例
航天案例
航空案例
兵器案例
工程机械案例
工业自动化案例