

成功案例
灵思创奇基于工业标准为用户开展多学科、多领域的半实物仿真测试工作提供平台支撑工具
您当前的位置:
论文案例:压电驱动的微定位系统抗扰控制
2025-09-17 10:09:34
2701
基本信息
北京工商大学·人工智能学院,发表于IEEE Access
论文内容简介
压电驱动的微定位系统的高精度运动使其在精密制造中发挥着关键作用。然而,压电驱动器的固有迟滞、各种不确定动态、传感器噪声等会严重降低其定位精度。为此,本文提出一种变带宽自抗扰控制以提高微定位控制精度。设计时变扩张状态观测器估计总扰动,以时变观测器带宽抑制量测噪声的对定位精度的影响;同时,设计时变控制带宽的控制器以抑制观测带宽减小对定位精度的影响。本文从理论上证明了时变扩张状态观测器的收敛性、变带宽自抗扰控制的闭环稳定性。此外,数值仿真和硬件实验也表明,与自抗扰控制相比,变带宽自抗扰控制能够很好地估计并补偿系统的总扰动,且能够更好地降低量测噪声的影响,获得更高的定位精度。
论文创新点
提出一种变带宽自抗扰控制策略,包括变观测带宽的观测器和变控制带宽的控制器,并将其应用于微定位控制,以提高微定位控制精度。
论文工程应用价值
从工程角度提出提高定位精度的实用抗扰控制算法,针对量测噪声设计相应观测器、为提高控制精度设计相应控制器,以降低噪声和扰动对定位精度的影响。
灵思创奇设备发挥的科研价值
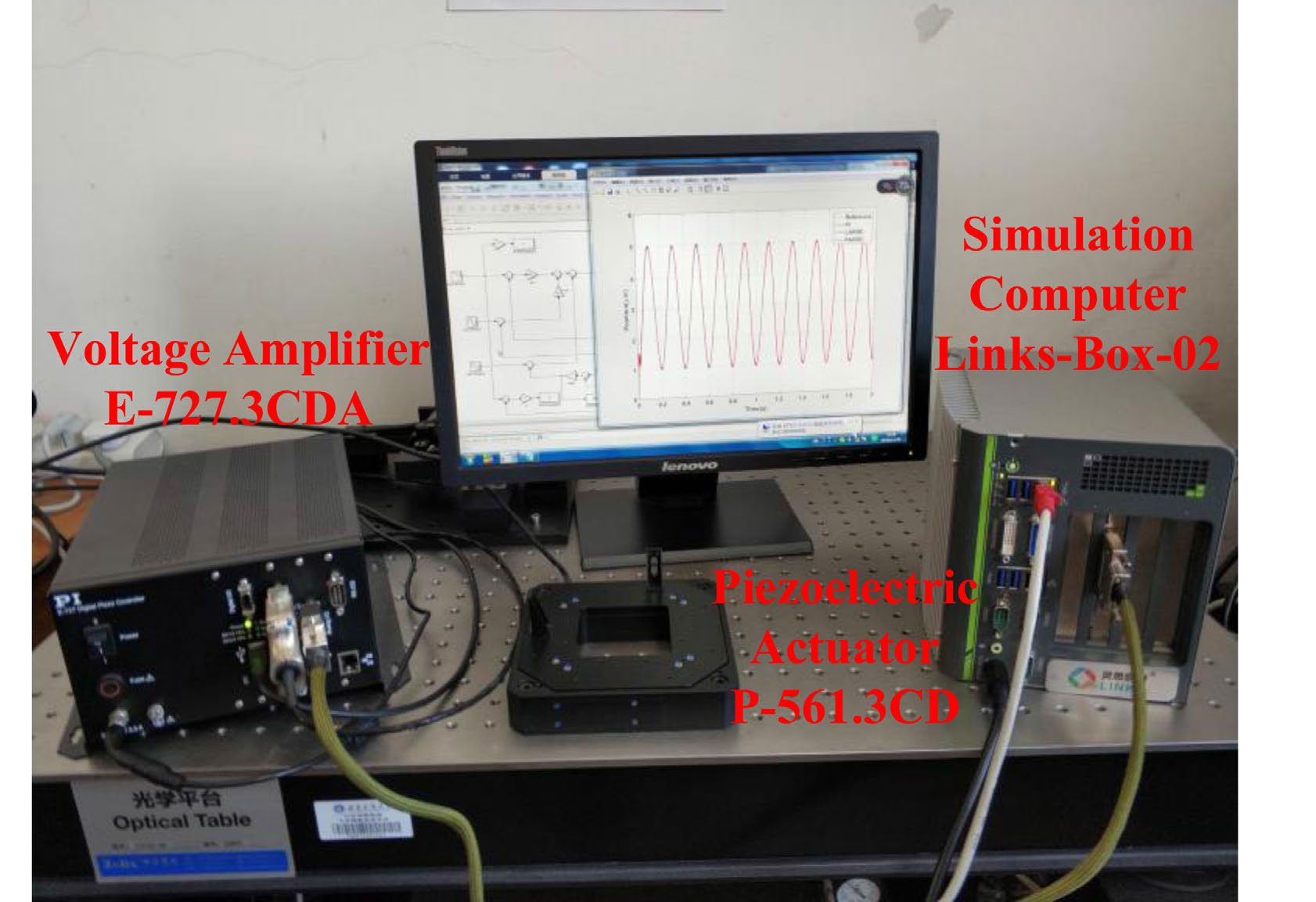
本文采用灵思创奇公司提供的Links-Box实验平台完成了算法的验证。
相关推荐
成功案例
航天案例
航空案例
兵器案例
工程机械案例
工业自动化案例