

项目简介
2018年8月河南科技大学机电工程学院基于我司半实物仿真系统搭建了医疗机器人快速原型控制实验平台,主要用于对医疗机器人人机交互控制算法的验证,并发表了一篇SCI论文《Human–robot interactive control based on reinforcement learning for gait rehabilitation training robot》。
论文简介
论文中提出了一种在步态康复训练中下肢外骨骼机器人与患者之间人机交互控制方法。双下肢外骨骼康复训练机器人由气动比例伺服系统驱动,单侧下肢有髋、膝关节两个旋转自由度。为解决康复训练的强度、难度适应患者需求的问题,不同于采用由设计者构造函数、智能规律来动态调整参数或特定任务的经验估计方法来设定参数,提出了在康复训练人机交互动态过程中,采用强化学习算法获得符合患者病况特征的控制参数的方法,并构建了力/位交互外环和关节位置控制内环的控制结构。
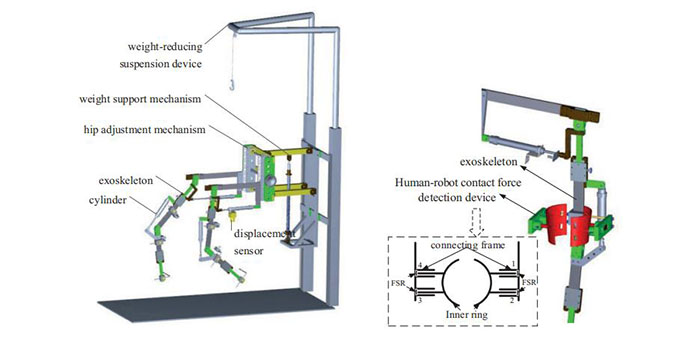
考虑气动系统的控制难度和建模的误差,设计了动力学特性前馈补偿的独立关节分散控制器实现关节空间内的步态轨迹跟踪。采用导纳模型作为人机交互模型,基于Sigmoid函数设计了导纳参数的自适应规律,利用强化学习算法获得康复训练中适合患者的个性化导纳参数。
通过被动和主动康复训练试验验证了该控制方法的有效性。被动康复训练试验结果验证了内环位置控制策略的有效性,能够满足康复训练中步态跟踪精度的要求。主动康复训练试验结果表明,在机器人辅助治疗中,交互控制器为患者提供个性化训练和主动柔顺性。气压驱动的被动柔顺和控制器提供的主动柔顺的综合效应有助于步态康复中的训练舒适性、安全性和治疗效果。
创新点
提出了基于强化学习的个性化变参数交互控制策略,利用Sarsa(0)算法,以时间最优为奖赏策略,创新性地将人机接触力与关节角度误差离散化后构建状态量的二维网格表示方法,并提出了最优策略与导纳参数之间的转换算法,将患者的个性化特征量化在算法中。
工程应用价值
通过强化学习获得适合该患者的个性化导纳参数,依据关节位移与力的动态互动,实现了康复训练中的主动柔顺。基于人机交互的个性化康复训练方法使机器人辅助康复治疗更符合康复医学,为康复医疗领域的共融机器人研究提供一定的理论与技术支撑,引导助老/助残机器人向临床应用迈出坚实的一步。
灵思创奇设备发挥的科研价值
针对系统中多传感器的数据采集与多个气动比例阀的控制需求,基于灵思创奇科技有限公司的半物理仿真机构建了硬件在回路的实时测试/控制系统。借助RT-Sim软件,开发控制算法完成测控试验验证。
该系统的搭建不仅为河南科技大学科研团队节省了科研时间,而且积累了宝贵的科研经验。在这里特别感谢河南科技大学师生对我们公司产品的信任和支持!