SCI论文|高转矩过载电机驱动混合储能系统及管理策略
SCI论文-基于嵌入谐振多项式和扰动观测器的改进无差拍预测电流控制策略的研究

SCI丨基于扰动观测器的永磁轮毂电机滑模控制策略
SCI论文丨一种高集成度的形状记忆合金作动器及基于位置补偿的精密自感知跟踪控制

华侨大学:六自由度机器人双机协同实验平台

论文案例:基于新型扩展状态观测器的永磁同步电机预测速度控制算法
论文案例:基于周期自适应学习的PMLSM位置伺服系统力矩波动补偿控制

论文案例:髋离断假肢测试与评价系统

论文案例:压电驱动的微定位系统抗扰控制
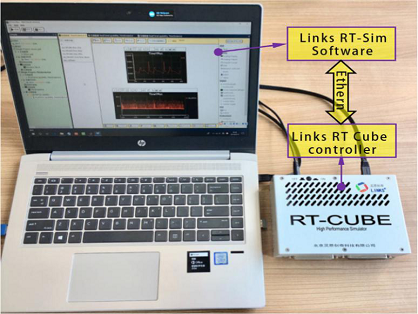
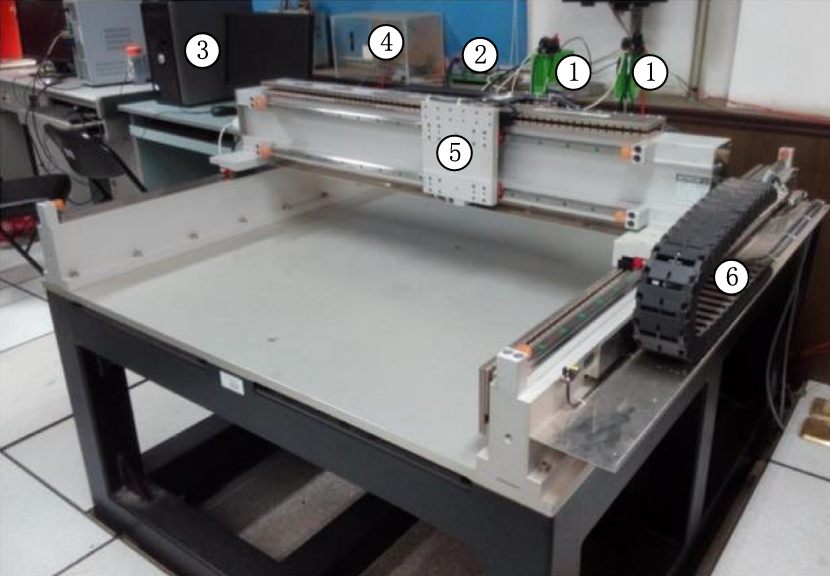
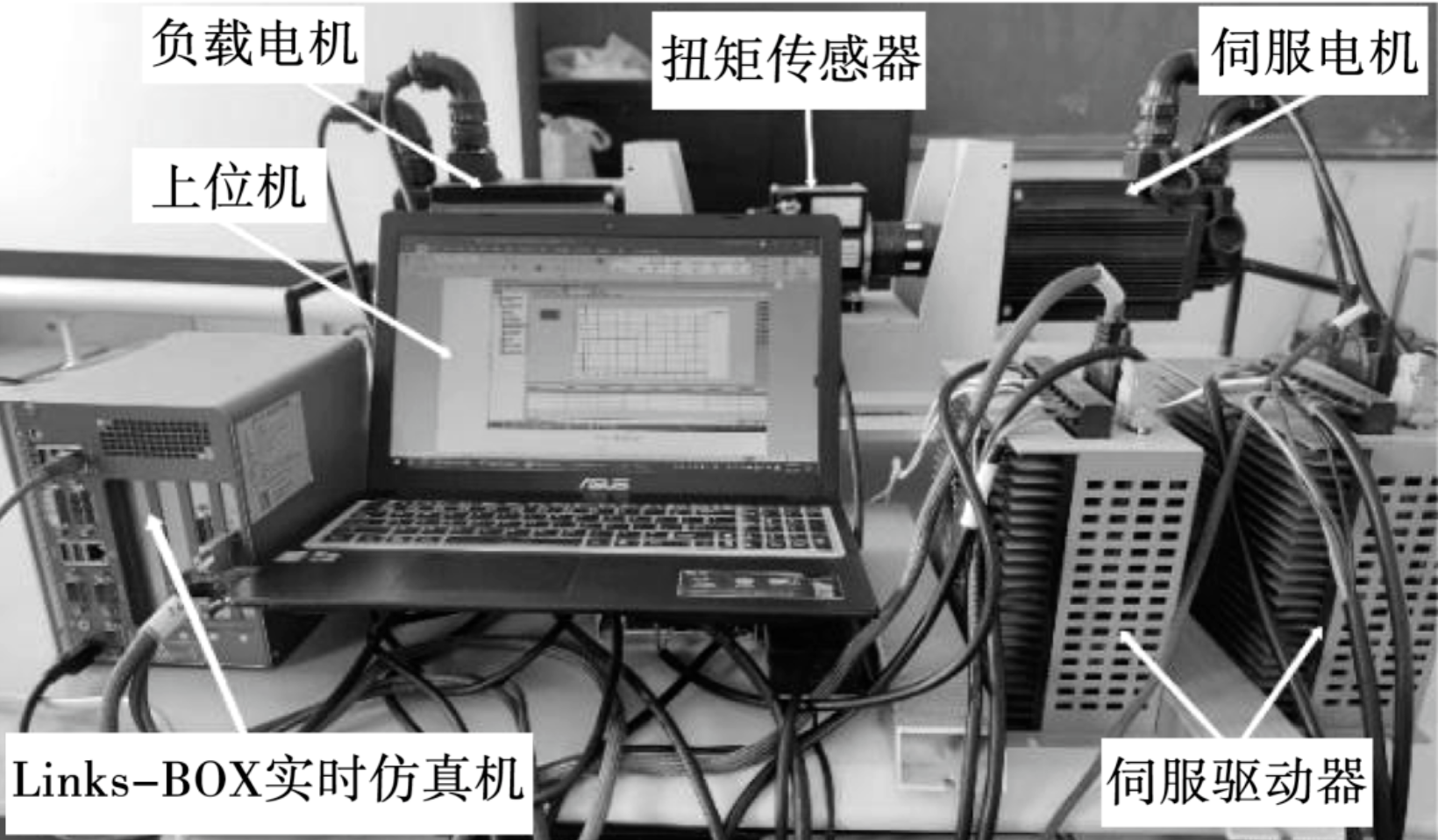
哈尔滨工程大学:轮廓误差实时估计方法验证

SCI论文丨基于嵌入谐振多项式和扰动观测器的改进无差拍预测电流控制策略的研究
EI论文|基于改进灰狼优化算法的PMSM滑模自抗扰控制
案例推荐
加速工程及科技创新,让智能装备的设计研发更简单高效
Links-Xil助力卫星设计验证—迈向巨型星座时代
卫星作为航天应用的主要载体,按照用途主要
可以分为通信、导航、遥感、科学与技术试验
四类,正不断改变着人类的生活,影响着人类
的文明。近年来,卫星产业发展迅猛,随着多
波束天线技术、频率复用技术、高级调制方案
软件定义无线电、软件定义载荷、软件定义网
络、以及一箭多星、火箭回收等技术的发展与
成熟,卫星小型化、星座巨型化成为发...