MBSE
基于模型的系统工程
基于模型的系统工程
北京灵思创奇科技有限公司依托深厚的系统工程积淀,
推出面向高端装备的MBSE(Model-Based Systems
Engineering)解决方案,帮助客户构建从设计、仿
真到验证的一体化数字链路,加速正向设计落地,降
低研制风险与成本。
以需求牵引设计
用模型驱动研发
靠仿真减少试验
查看更多
面临挑战
复杂系统无法依赖“设计-制造测试-修改"的快速迭代。
必须通过正向设计,在制造前锁定不确定性。
必须通过正向设计,在制造前锁定不确定性。
多学科交叉
01
多学科交叉
涉及控制、电子、机械、软件、液压等多
领域,系统集成阶段问题集中爆发,传统
“串行”验证导致反复迭代,效率低下
01
系统高集成
02
系统高集成
数千个组件、多种总线架构(如1553B、
ARINC429、AFDX、CAN、MVB)软硬
件深度耦合,接口定义不一致、信号冲突
等问题往往到系统联试才发现,修改成本 高昂。
02
试错成本高
03
试错成本高
物理样机测试周期长、费用昂贵,一次失 败可能延误数年
03
故障复现难
04
故障复现难
真实环境中故障注入风险大、复现困难,
系统在极限条件下的安全性和容错能力难 以充分验证,留下安全隐患
04
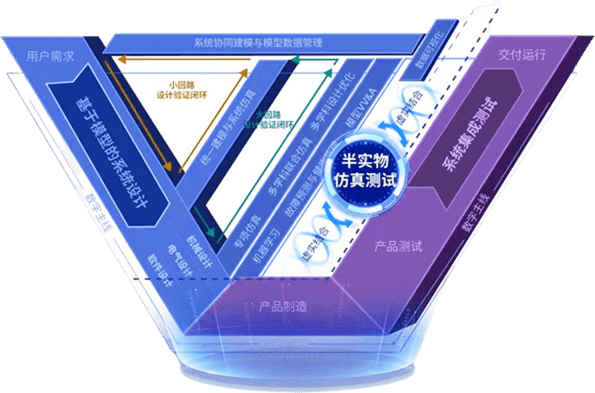
核心功能
基于正向设计方法论MBSE,服务于国防军工、商业航天、汽车、
能源电力及工厂自动化等行业
能源电力及工厂自动化等行业
多学科联合仿真
在系统开发早期,通过多学科联合仿真验证系统级性能,提前发现设计缺陷。
跨领域协同
集成控制、液压、机械、电气等多领域模型,支持MATLAB/Simulink、Amesim、MWORKS等主流仿真工具联合运行
架构优化
支持系统架构方案快速比选,通过仿真数据驱动设计决策
客户价值
在制造物理样机前完成90%以上系统级验证,将问题发现在设计阶段,缩短研制周期30%以上,减少物理样机迭代次数
快速控制原型(RCP)
将控制算法快速部署到实时硬件上,与被控对象模型闭环运行,实现控制策略的快速验证与优化。
无缝衔接
支持MWORKS、Simulink模型自动代码生成,一键部署到高性能实时目标机,无需手动编码;
在线调参
实时监控算法运行状态,在线调整控制参数,即时观察系统响应
I/O适配
支持CAN、ARINC429、1553B、A/D、D/A、PWM等多种I/O接口
数据记录
高速数据采集与实时波形显示,支持算法性能深度分析
客户价值
控制算法迭代周期从天级缩短到小时级,快速验证创新控制策略,降低算法开发风险。
硬件在环测试(HIL)
将真实控制器(飞控计算机、VCU、ECU等)接入仿真环境,在实验室完成软硬件集成测试,提前暴露接口与实时性问题。
高保真实时仿真
实时运行被控对象模型(飞行动力学、发动机、车辆动力学等),为控制器提供真实的传感器信号与负载响应
总线仿真与监测
支持ARINC429、1553B、CAN、FlexRay、以太网等主流协议,可模拟总线通信并监测总线数据
故障注入
模拟传感器失效、执行器卡死、总线断连、电源瞬断等百余种故障模式,验证控制器的故障诊断与容错能力
客户价值
在实验室完成90%以上的软硬件集成测试,将台架试验和现场调试时间缩短50%以上,大幅降低测试风险与成本
系统集成测试
将多个子系统的真实硬件接入集成测试环境,完成全系统联调与自动化验证,确保系统级功能性能达标。
多节点集成
支持多台真实控制器、执行器、传感器同时接入,构建全系统半实物仿真环境,验证子系统间的交互与协同
自动化测试
提供图形化测试用例设计环境,支持测试序列的拖拽式编排与自动化执行;内置丰富的测试库与报告模板,自动生成符合行业标准的测试报告
ICD一致性验证
集成ICD管理软件,实现接口定义与测试用例的双向关联,自动检查总线通信与接口定义的一致性
回归测试
当系统变更时,可快速执行自动化回归测试,确保变更不影响已有功能
全流程追溯
从需求到测试用例再到测试报告,实现双向追溯,满足适航与行业审查要求
客户价值
实现全系统集成验证的标准化与自动化,将系统联试周期缩短40%以上,提升测试覆盖度与可信度,降低人为失误
01
多学科联合仿真
02
快速控制原型(RCP)
03
硬件在环测试(HIL)
04
系统集成测试
解决方案
满足不同行业场景需求提供专业融合的数字化工程解决方案

航空装备
灵思创奇以Links-XIL平台为核心,覆盖航电系统(铁鸟试验、飞控仿真、总线激励)、机电系统(电机伺服控制、多学科联合仿真)、液压系统(基于HIL的电磁阀控制与电液联合仿真),实现MIL→HIL全流程半实物验证与数字孪生。
查看详情
为什么选择灵思创奇
灵思创奇是北京市2021年首批专精特新企业,产品软硬件均拥有自主知识产权
在多个工业领域实现进口产品替代

深耕高端装备领域
团队核心成员来自航空航天、船舶、汽车等国家重点行业,深谙相关行业标准与系统工程流程
01

实战验证
累计服务300+工业客户,多项国家重大型号验证,帮助客户减少30%以上设计返工,缩短20%研发周期,提升系统一次成功率。
02

自主可控技术
拥有完全自主知识产权的HIL平台、故障注入与ICD管理软件,适配国产操作系统与应用开发工具,保障供应链安全,满足自主可控要求。
03

AI辅助智能测试
支持基于DeepSeek自动生成ICD文件,自动生成测试用例,自动执行测试过程,并生成测试报告,典型项目测试效率提升60%以上。
04
成功案例
加速工程及科技创新,让智能装备的设计研发更简单高效
查看详情
Links-Xil助力卫星设计验证—迈向巨型星座时代
卫星作为航天应用的主要载体,按照用途主要
可以分为通信、导航、遥感、科学与技术试验
四类,正不断改变着人类的生活,影响着人类
的文明。近年来,卫星产业发展迅猛,随着多
波束天线技术、频率复用技术、高级调制方案
软件定义无线电、软件定义载荷、软件定义网
络、以及一箭多星、火箭回收等技术的发展与
成熟,卫星小型化、星座巨型化成为发...