



资讯
加速工程及科技创新,让智能装备的设计研发更简单高效
强势进化,重磅更新丨Links-RT2022a来啦!
随着基于模型的系统工程(MBSE)在高端智能装备设计、研制阶段的广泛应用,半实物仿真仿真测试技术作为可贯穿复杂系统设计 V 流程全生命周期的分析手段,除具备分析方便、快捷等特点,还可作为实物试验有效的补充手段,在仿真可信度较高的情况下能有效降低实物试验次数,进而节约成本,提高效率。为了协助用户快速、高效、安全、经济地完成智能装备控制器开发和测试。近期,灵思创奇在Links-RT2021a版本的实时仿真平台进行功能升级,发布了Links-RT2022a新版本。
新版本进一步升级了平台实时仿真运算能力和建模环境兼容性,具体新特性如下:
1.上位机主控软件新增多模型加载、仿真核心分配、任务状态监视、接口映射等功能
2.新增多核并行仿真功能,可同时导入多个FMU模型,如MATLAB、AMESim、MWorks、Simpack、Motion、Dymola等多领域、多类型仿真模型相互连接,协同运行。
3.IO适配:Linux版本完成了多个常用板卡和通讯协议的适配工作。
4.新增Linux实时化组件,新增FMU模型调度、多任务管理功能
5.新增demo模型:AMESim三位一体汽车仿真模型、MWorks飞行控制系统仿真模型、Simpack磁悬浮小车速度控制等。
一、上位机软件功能更新
1. 新增多模型加载功能
图1:多模型加载
Links-RT2022a新版本支持同时导入多个Simulink和FMU模型,支持多个模型多个模型相互连接,协同运行。
2. 新增仿真核心分配功能
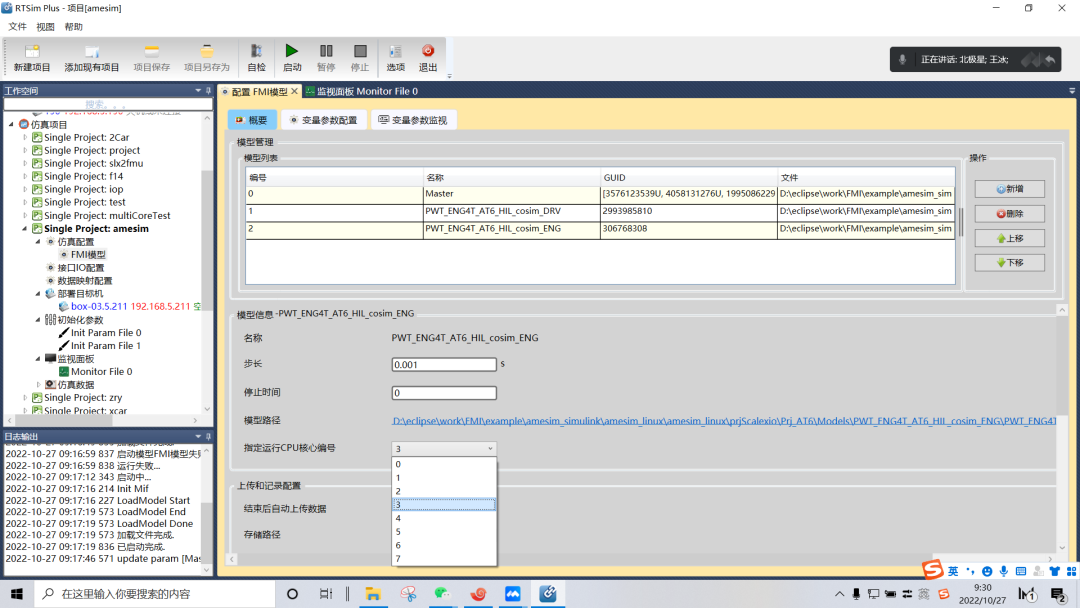
图2:仿真核心分配
Links-RT2022a版本支持复杂仿真模型任务自主拆分功能,使用者可将各部分任务分配到特定的处理器核上,来调整实时系统的性能,或者把时间关键的代码部分隔离在专用核上,来满足关键任务解决方案的确定性和实时性要求。
3. 任务状态监视功能升级
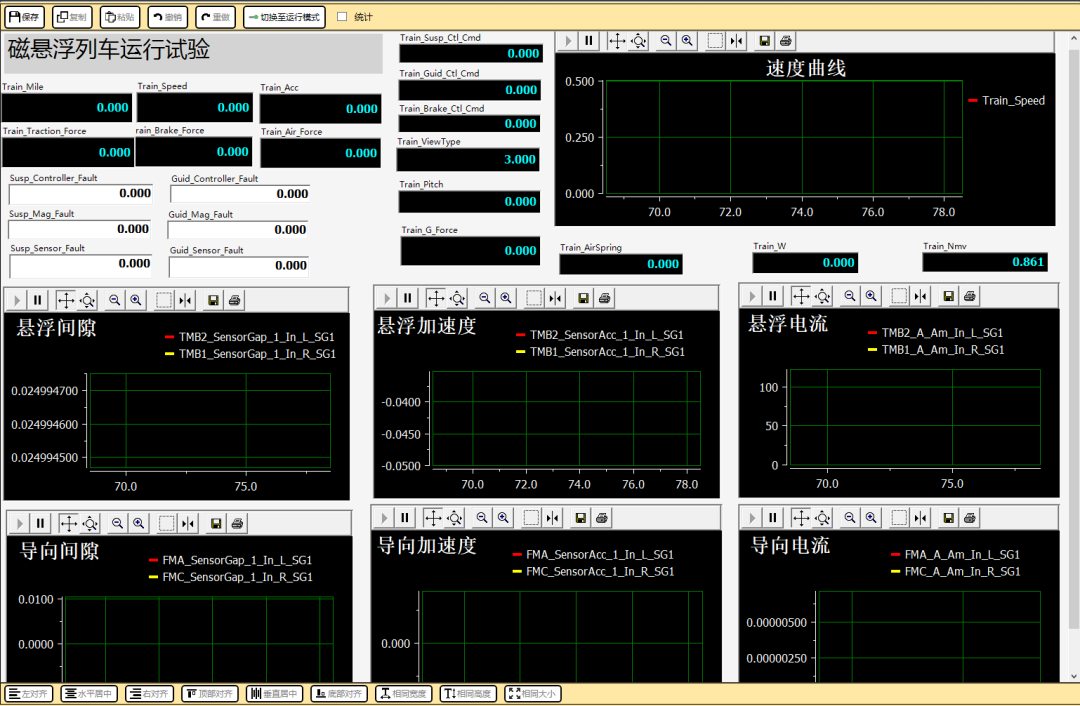
图3:任务状态监视面板
4. 新增数据映射功能
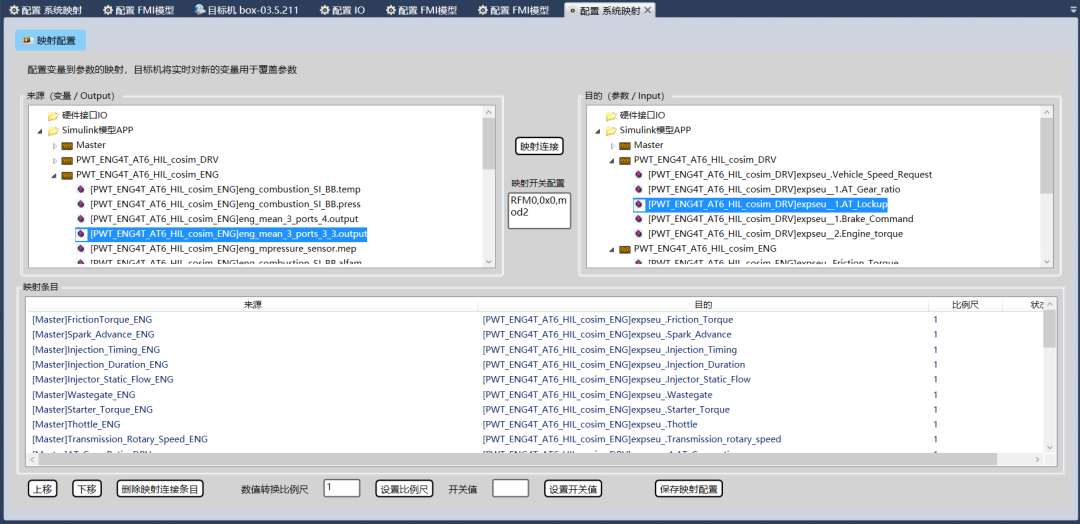
图4:数据映射配置界面
Links-RT2022a版本新增数据映射功能,可根据实际试验需求将各个分系统模型的输入、输出接口相关联, 实现试验任务重分系统的数据交互、联合仿真的目的。
二、实时运算能力升级
1. 新增多核并行仿真功能
新增多核(最高可达32核)并行仿真功能,保证在确定的时间内(微秒级)完成控制算法的执行和中断调度。
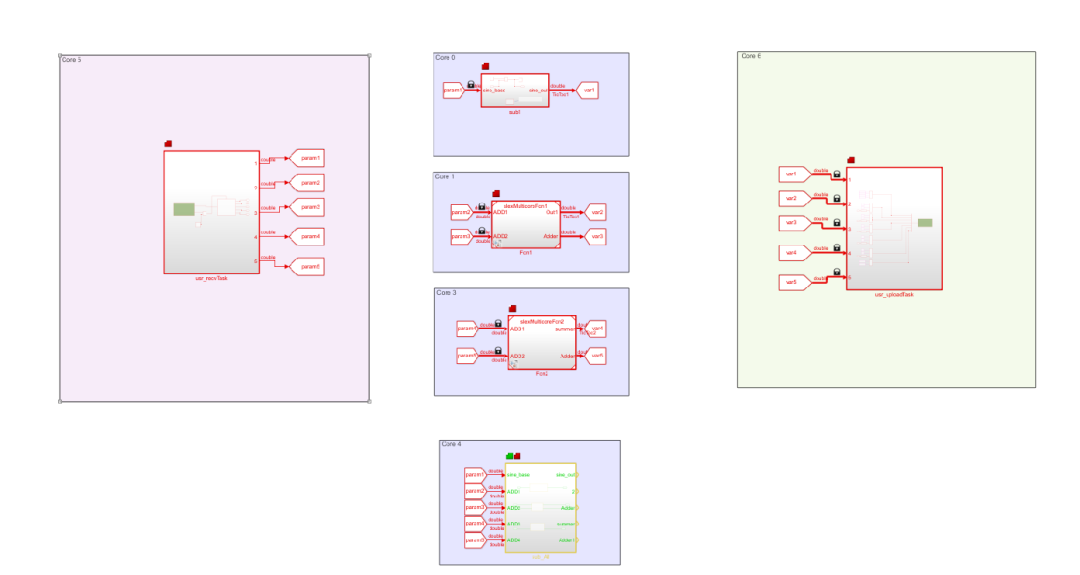
图5:多核任务搭建
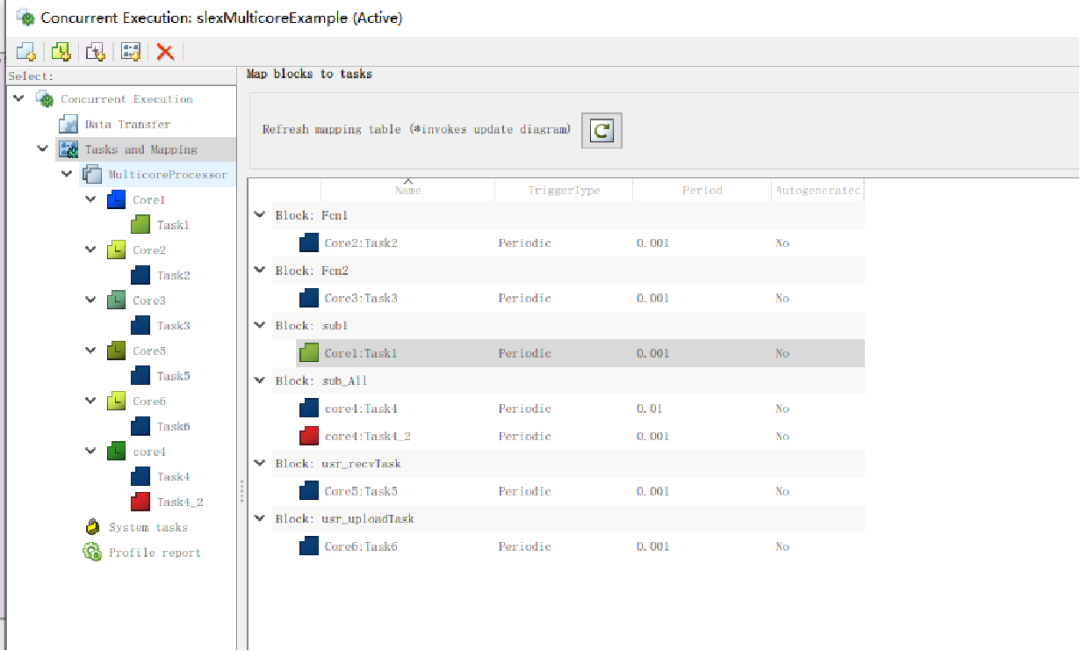
图6:CPU核心任务映射
图7:多核任务监视、运行
2. 基于FMI标准,新增多领域联合仿真功能
FMI 标准的全称是Functional Mock-up Interface ,它是一个不依赖于工具的标准,其通过 XML 文件和已编译的 C 代码的组合来同时支持动态模型的模型交换 ( Model Exchange) 和联合仿真 (Co-Simulation) ,FMI标准的提出主要是为了应对复杂装备研制过程中,工具碎片化、模型重用和知识产权保护等问题
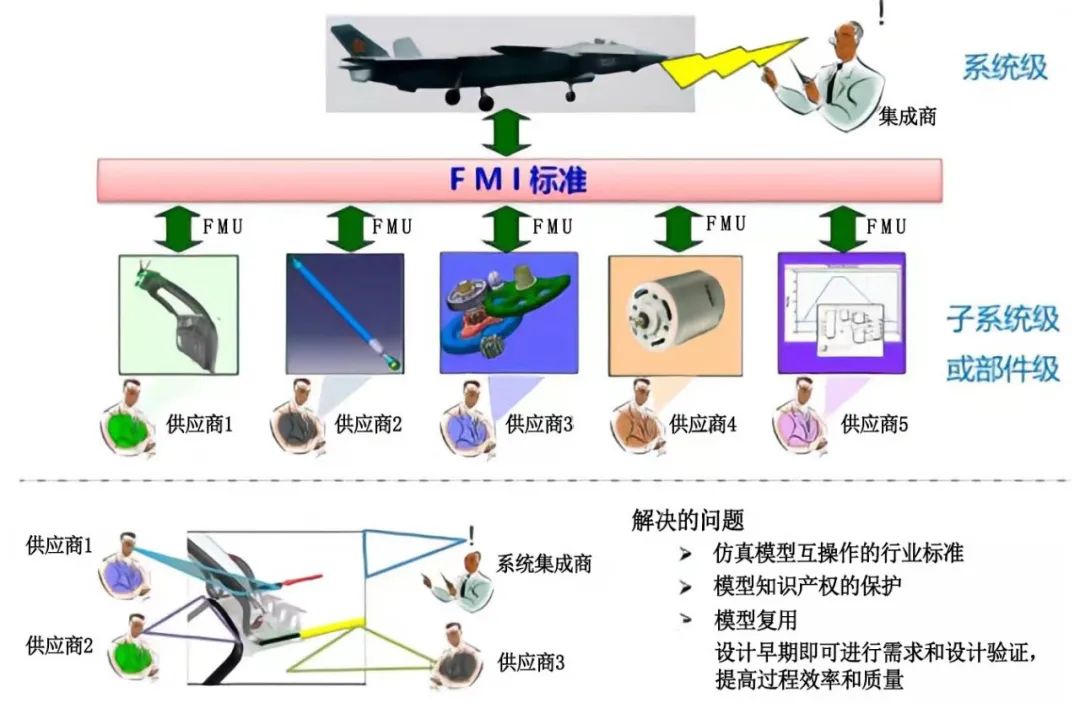
图8:FMI建模标准
Links-RT2022a版本支持一键导入FMU模型,可与MATLAB、AMESim、MWorks、Simpack、Motion、Dymola等多学科、多领域仿真建模软件构建大型、复杂实验场景。
三、io适配能力升级
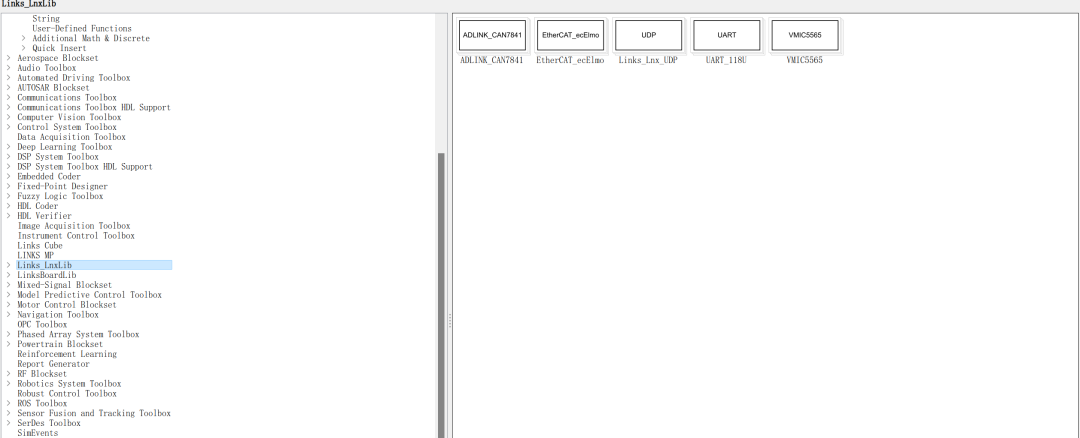
图9:Linux多核版本IO模块
Links-RT2022a(Linux版本)已完成多个常规IO及通信协议的适配工作,如:CAN、SIO、RFM、EtherCat等。
四、新增Linux实时化组件
Links-RT2022a版本采用Linux平台,基于对称多线程处理技术(SMP),通过实时补丁优化、CPU隔离、高精度定时器、调度引擎等手段,为用户提供多核并行仿真功能,支持FMU模型调度、多任务管理等新特性。
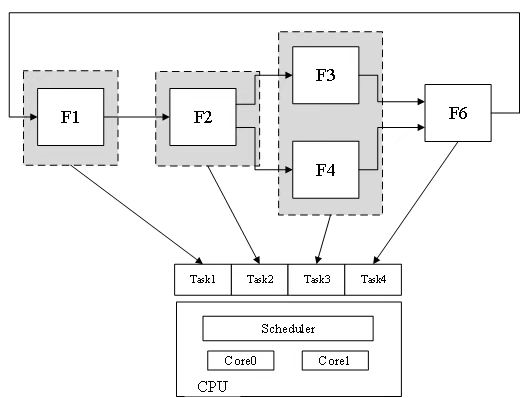
图10:多核并行仿真
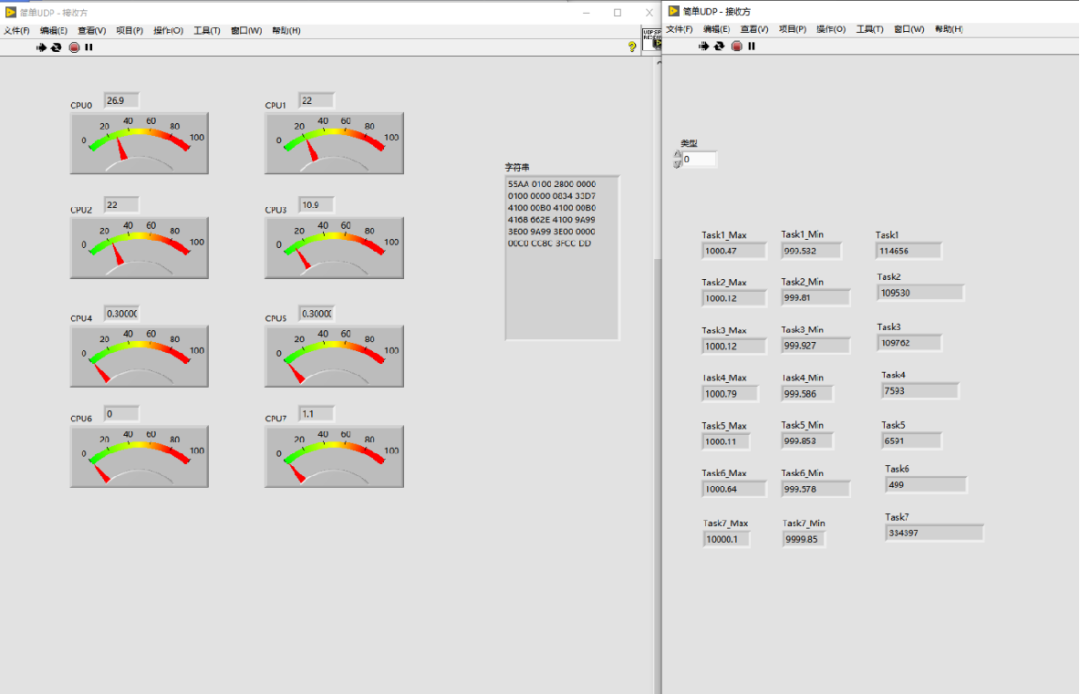
图11:CPU核心状态监测
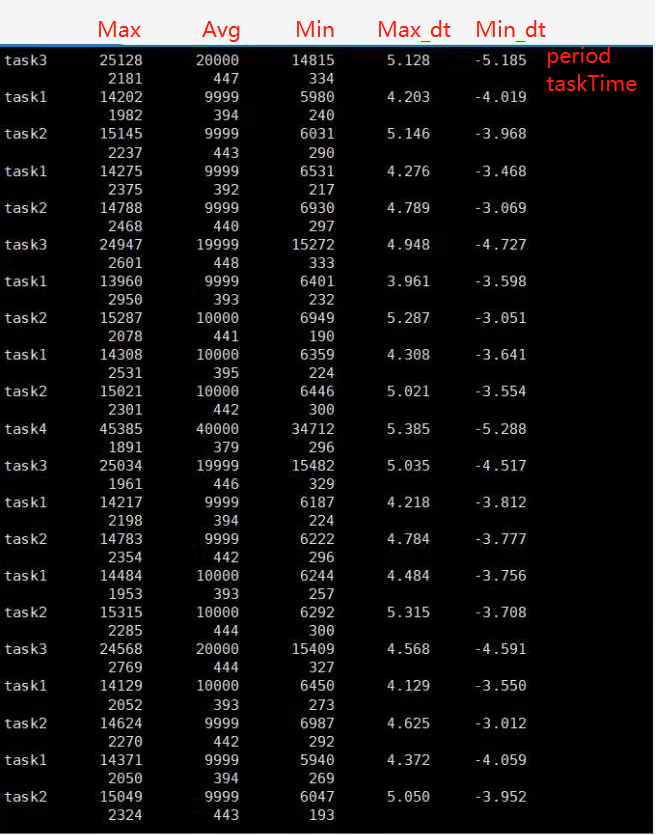
图12:任务测试结果
五、新增demo模型
Links-RT2022a版本将新增多个示例DEMO模型,如:AMESim三位一体汽车仿真模型、MWorks飞行控制系统仿真模型、Simpack磁悬浮小车速度控制模型等,未来我们也将持续致力于为用户提供丰富的系统模型和应用场景,满足不同工况场景的仿真需求。
示例1:AMESim汽车模型测试
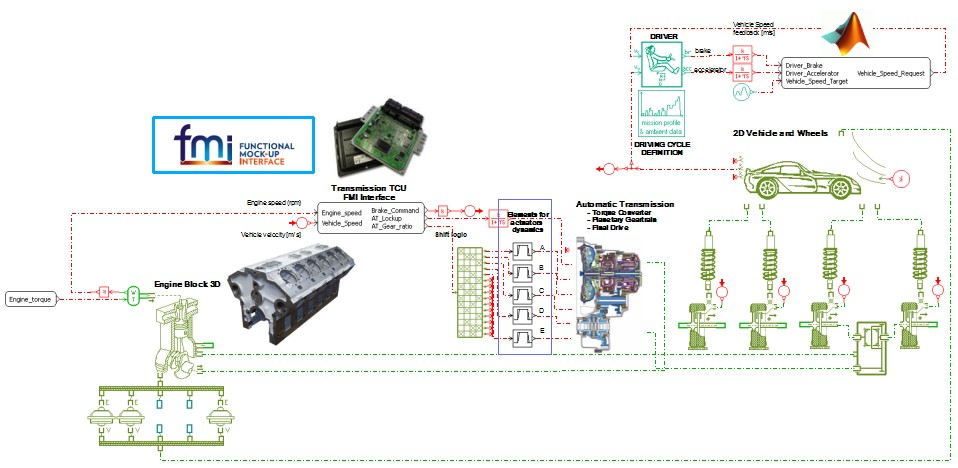
本模型测试用例为使用AMESim软件导出的AMESim和Simulink联合仿真demo。

图13:AMESim三位一体汽车仿真模型
此demo中包含的模型文件有:
1. Master.slx:Simulink模型,为联合仿真的主控软件,需要将模型输入输出链接到以下两个fmu模型。
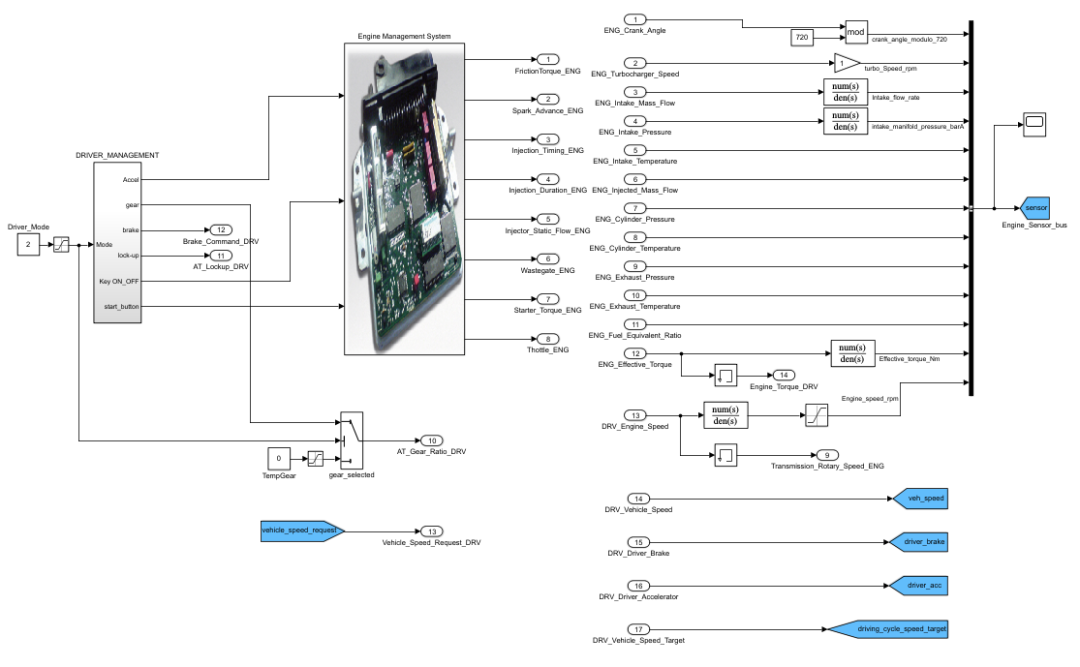
图14:主控软件模型
2. PWT_ENG4T_AT6_HIL_cosim_DRV.fmu:AMESim导出的fmu模型,为联合仿真的汽车驾驶模块,需要将输入输出与Master.slx模型链接。
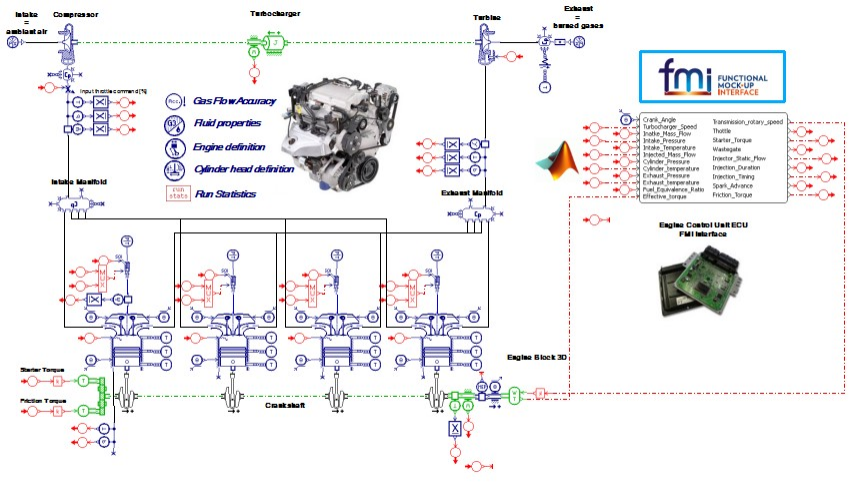
3. PWT_ENG4T_AT6_HIL_cosim_ENG.fmu:AMESim导出的fmu模型,为联合仿真的汽车引擎模块,需要将输入输出与Master.slx模型链接。
模型启动后,在自动驾驶模式中,ENG4T_AT6_HIL_cosim_DRV汽车驾驶模块会生成输出汽车档位、油门踏板、刹车踏板、钥匙(开关)、启动按钮的输出,传入Master.slx模型中。随后Master.slx模型根据驾驶模型(0:用户手动驾驶/1:全自动周期输出控制数据/2:用户指定目标速度驾驶)来切换输入,结合当前PWT_ENG4T_AT6_HIL_cosim_ENG模块中引擎的状态与输入的指令数值,计算出输出的引擎指令传入PWT_ENG4T_AT6_HIL_cosim_ENG继续计算。这里我们选择模式2来进行测试。使用SimulinkPack组件编译Master.slx模型文件,生成目标平台模型文件与模型信息描述文件。
1. 使用RTSimPlus主控软件导入三个模型,将模型之间的输入输出链接来,部分链接条目如下图所示:
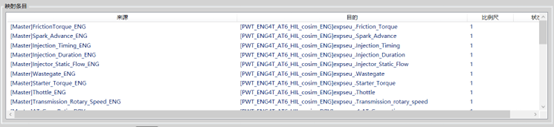
图15:输入输出链接
2. 设置模型核心分配。DRV在2核,ENG在3核。Slx模型在编译时核心分配已经设置好了。设置变量上传周期1ms
3. 建立面板控件,连接监视的变量,如下图:
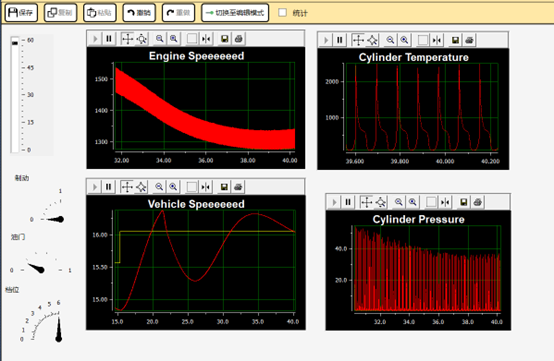
图16:监控面板
4. 点击启动按钮,运行模型,期间随意拖动速度条进行改参。
5. 结束运行,上传仿真数据,进行分析。
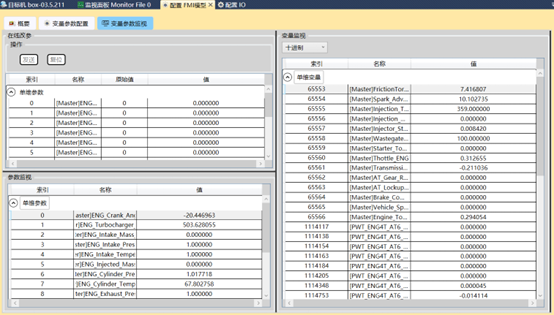
图17:数据监视结果
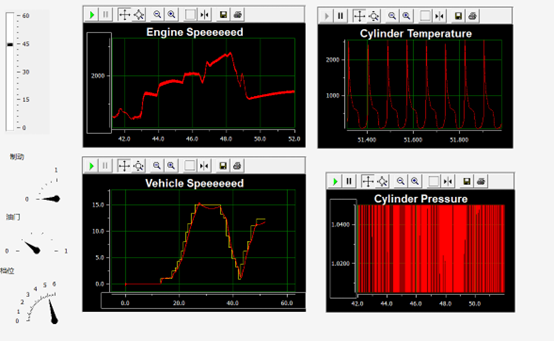
图18:面板监视结果
其中汽车速度黄线为我们拖动速度条输入的需求速度,红线为时间速度,经过测试,该仿真模型能够在targetEngine中稳定运行四小时以上,产生3GB的数据记录文件。上位机仍可成功解析数据记录文件,并且生成8GB的csv或excel文档。
示例2:MWorks飞行控制系统仿真
MWorks软件FMU模型示例
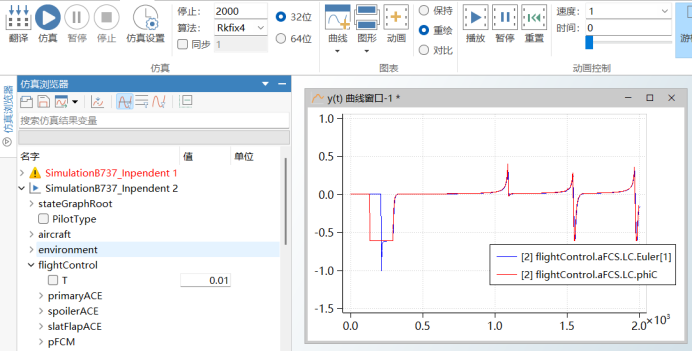
图19:MWorks飞行控制系统模型
设置模型分配到2核,步长使用0.001,上传周期为1ms。监视、记录两个变量,监视面板结果如下:
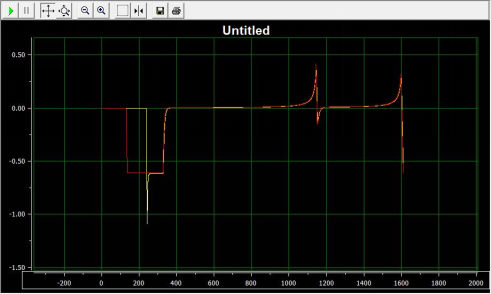
图20:监视面板结果
结束模型,上传仿真记录,并且绘制曲线,部分曲线如下图:
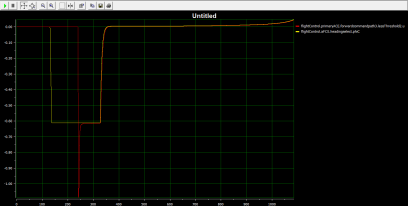
图21:仿真记录
示例3:Simpack磁悬浮小车速度控制
Simpack软件中导出的磁悬浮车车模型。模型使用Simpack自带的解算器并且在fmu内部创建线程运算,模型有两个导出变量。
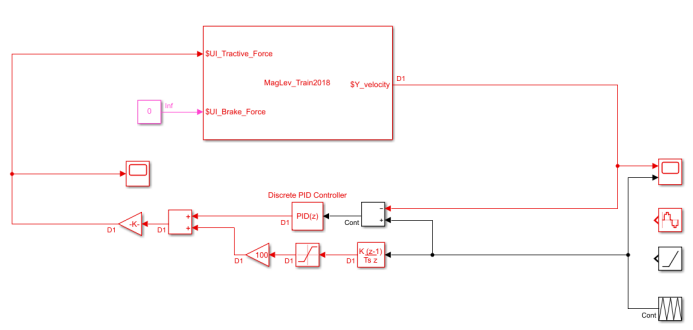
图22:Simpack磁悬浮小车速度控制模型
使用RTSimPlus主控软件导入模型,设置步长为1ms,上传周期1ms,建立面板控件,连接监视的变量。
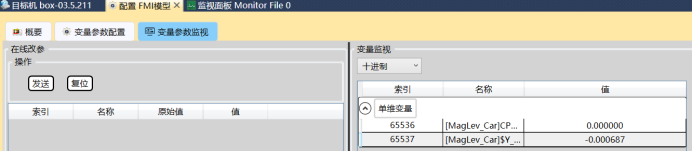
图23:数据监视结果
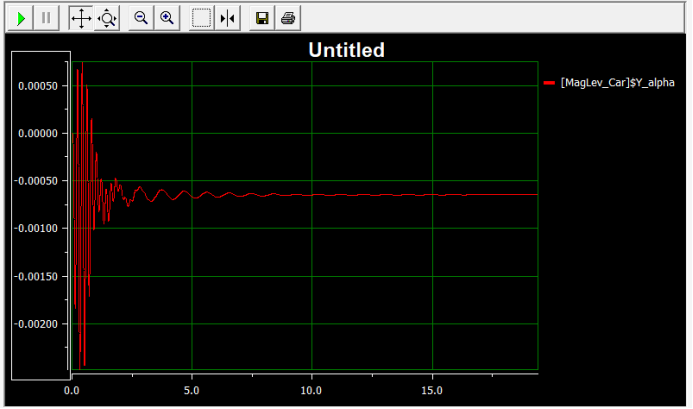
图24:监视面板
经过测试,Simpack导出的MagLev_Car仿真模型能够在targetEngine中稳定运行。
预售在即,了解更多升级详情,欢迎联系我司工作人员,作为国内第一家提出小型化、原型化、场景化、标准化工业数字孪生平台厂商,灵思创奇将持续提升公司智能装备仿真测试一体化平台LINKS-XIL的核心能力,以满足高端装备制造行业国产化自主可控需求。